 广州凌控自动化科技有限公司
广州凌控自动化科技有限公司
http://m.chlingkong.com
凌控导读:本系统的主要功能都是由PLC来实现的,当满足风力机起动条件时,PLC发出指令使叶片桨距角从90�匀速减小;当发电机并网后PLC根据反馈的功率进行功率调节,在额定风速之下保持较高的风能吸收系数,在额定风速之上,通过调整桨距角使输出功率保持在额定功率上欧姆龙PLC 在有故障停机或急停信号时,PLC控制电磁阀J-A和J-C打开,J-B关闭,使得叶片迅速变到桨距角为90�的位置欧姆龙PLC
摘要:在风力发电系统中,变桨距控制技术关系到风力发电机组的安全可靠运行,影响风力机的使用寿命,通过控制桨距角使输出功率平稳、减小转矩振荡、减小机舱振荡,不但优化了输出功率,而且有效的降低的噪音,稳定发电机的输出功率,改善桨叶和整机的受力状况风电机组 变桨距风力发电机比定桨距风力发电机具有更好的风能捕捉特性,现代的大型风力发电机大多采用变桨距控制风电机组 本文针对国外某知名风电公司液压变桨距风力机,采用可编程控制器(PLC)作为风力发电机的变桨距控制器风电机组 这种变桨控制器具有控制方式灵活,编程简单,抗干扰能力强等特点变桨距系统 本文介绍了液压变桨距系统的工作原理,设计了变桨控制器的软件系统变桨距系统 最后在国外某知名风电公司风力发电机组上做了实验,验证了将该变桨距控制器可以在变桨距风力机上安全、稳定运行的变桨距系统
1、引言
随着风电技术的不断成熟与发展,变桨距风力发电机的优越性显得更加突出:既能提高风力机运行的可靠性,又能保证高的风能利用系数和不断优化的输出功率曲线。采用变桨距机构的风力机可使叶轮重量减轻,使整机的受力状况大为改善,使风电机组有可能在不同风速下始终保持最佳转换效率,使输出功率最大,从而提高系统性能。随着风电机组功率等级的增加,采用变桨距技术已是大势所趋。目前变桨执行机构主要有两种:液压变桨距和电动变桨距,按其控制方式可分为统一变桨和独立变桨两种。在统一变桨基础上发展起来的独立变桨距技术,每支叶片根据自己的控制规律独立地变化桨距角,可以有效解决桨叶和塔架等部件的载荷不均匀问题,具有结构紧凑简单、易于施加各种控制、可靠性高等优势,越来越受到国际风电市场的欢迎。
兆瓦级变速恒频变桨距风电机组是目前国际上技术比较先进的风力机型,从今后的发展趋势看,必然取代定桨距风力机而成为风力发电机组的主力机型。其中变桨距技术在变速恒频风力机研究中占有重要地位,是变速恒频技术实现的前提条件。研究这种技术,提高风电机组的柔性,延长机组的寿命,是目前国外研究的热点,但是国内对此研究甚少,对这一前瞻性课题进行立项资助,掌握具备自主知识产权的独立变桨控制技术,对于打破发达国家对先进的风力发电技术的垄断,促进我国风力发电事业的进一步发展具有重要意义。
为了获得足够的起在变桨距系统中需要具有高可靠性的控制器,本文中采用了OMRON公司的CJ1M系列可编程控制器作为变桨距系统的控制器,并设计了PLC软件程序,在国外某知名风电公司风力发电机组上作了实验。
2、变桨距风力机及其控制方式
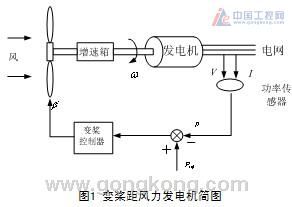
变桨距调速是现代风力发电机主要的调速方式之一,如图1所示为变桨距风力发电机的简图。调速装置通过增大桨距角的方式减小由于风速增大使叶轮转速加快的趋势。当风速增大时,变桨距液压缸动作,推动叶片向桨距角增大的方向转动使叶片吸收的风能减少,维持风轮运转在额定转速范围内。当风速减小时,实行相反操作,实现风轮吸收的功率能基本保持恒定。液压控制系统具有传动力矩大、重量轻、刚度大、定位精确、液压执行机构动态响应速度快等优点,能够保证更加快速、准确地把叶片调节至预定节距[4][5]。目前国内生产和运行的大型风力发电机的变距装置大多采用液压系统作为动力系统。
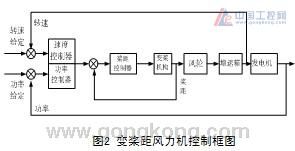
如图2所示为变桨距控制器的原理框图。在发动机并入电网之前由速度控制器根据发动机的转速反馈信号进行变桨距控制,根据转速及风速信号来确定桨叶处于待机或顺桨位置;发动机并入电网之后,功率控制器起作用,功率调节器通常采用PI(或PID)控制,功率误差信号经过PI运算后得到桨距角位置。
当风力机在停机状态时,桨距角处于90�的位置,这时气流对桨叶不产生转矩;当风力机由停机状态变为运行状态时,桨距角由90�以一定速度(约1�/s)减小到待机角度(本系统中为15�);若风速达到并网风速,桨距角继续减小到3�(桨距角在3�左右时具有最佳风能吸收系数);发电机并上电网后,当风速小于额定风速时,使桨距角保持在3�不变;当风速高于额定风速时,根据功率反馈信号,控制器向比例阀输出-10V- 10V电压,控制比例阀输出流量的方向和大小。变桨距液压缸按比例阀输出的流量和方向来操纵叶片的桨距角,使输出功率维持在额定功率附近。若出现故障或有停机命令时,控制器将输出迅速顺桨命令,使得风力机能快速停机,顺桨速度可达20�/s。
3、变桨控制器的设计
3.1系统的硬件构成
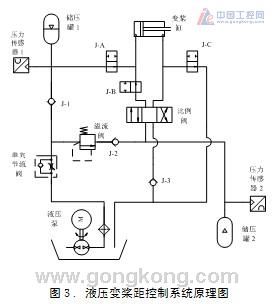
本文实验中采用国外某知名风电公司风力发电机组作为实验对象,其额定功率550KW,采用液压变桨系统,液压变桨系统原理图如图3所示。从图3中可以看出,通过改变液压比例阀的电压可以改变进桨或退桨速度,在风力机出现故障或紧急停机时,可控制电磁阀J-B闭合、J-A和J-C打开,使储压罐1中的液压油迅速进入变桨缸,推动桨叶达到顺桨位置(90�)。
本系统中采用OMRON公司的CJ1M系列PLC。发电机的功率信号由高速功率变送器以模拟量的形式(0~10V对应功率0~800KW)输入到PLC,桨距角反馈信号(0~10V对应桨距角0~90�)以模拟量的形式输入到PLC的模拟输入单元;液压传感器1、2也要以模拟量的形式输入。在这里选用了4路模拟量的输入单元CJ1W-AD041;模拟量输出单元选用CJ1W-DA021,输出信号为-10V~ 10V,将信号输出到比例阀来控制进桨或退桨速度;为了测量发电机的转速,选用高速计数单元CJW-CT021,发电机的转速是通过检测与发电机相连的光电码盘,每转输出10个脉冲,输入给计数单元CJW-CT021。
3.2 系统的软件设计
本系统的主要功能都是由PLC来实现的,当满足风力机起动条件时,PLC发出指令使叶片桨距角从90�匀速减小;当发电机并网后PLC根据反馈的功率进行功率调节,在额定风速之下保持较高的风能吸收系数,在额定风速之上,通过调整桨距角使输出功率保持在额定功率上。在有故障停机或急停信号时,PLC控制电磁阀J-A和J-C打开,J-B关闭,使得叶片迅速变到桨距角为90�的位置。
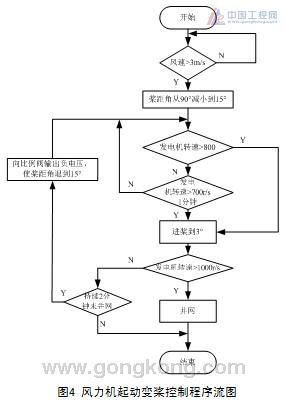
风力机起动时变桨控制程序流程如图4所示。当风速高于起动风速时PLC通过模拟输出单元向比例阀输出1.8V电压,使叶片以0.9�/s的速度变化到15�。此时,若发电机的转速大于800r/min或者转速持续一分钟大于700r/min,则桨叶继续进桨到3�位置。PLC检测到高速计数单元的转速信号大于1000r/min时发出并网指令。若桨距角在到达3�后2分钟未并网则由模拟输出单元给比例阀输出-4.1V电压,使桨距角退到15�位置。
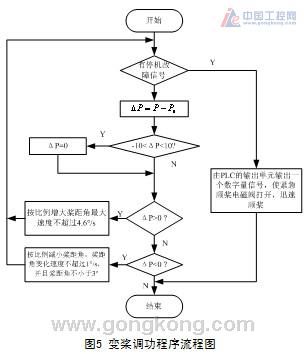
发电机并上电网后通过调节桨距角来调节发电机输出功率,功率调节程序流程图如图5所示。当实际功率大于额定功率时,PLC的模拟输出单元CJ1W-DA021输出与功率偏差成比例的电压信号,并采用LMT指令使输出电压限制在-4.1V(对应变桨速度4.6�/s)以内。当功率偏差小于零时需要进桨来增大功率,进桨时给比例阀输出的最大电压为1.8V(对应变桨速度0.9�/s)。为了防止频繁的往复变桨,在功率偏差在�10kW时不进行变桨。
在变桨距控制系统中,高风速段的变桨距调节功率是非常重要的部分,若退桨速度过慢则会出现过功率或过电流现象,甚至会烧毁发电机;若桨距调节速度过快,不但会出现过调节现象,使输出功率波动较大,而且会缩短变桨缸和变桨轴承的使用寿命。会影响发电机的输出功率,使发电量降低。在本系统中在过功率退桨和欠功率进桨时采用不同的变桨速度。退桨速度较进桨速度大,这样可以防止在大的阵风时出现发电机功率过高现象。
图6为变桨距功率调节部分的梯形图程序。100.08是启动功率调节命令,当满足功率调节条件时,继电器100.08由0变为1;D2100存放的是发动机额度功率与实际功率的偏差,当偏差ΔP满足-10kW<δp<10kw时将0赋给d2100;60.07为1时即功率偏差为负值,d2100中的功率偏差按一定比例进行缩放,并通过lmt指令限位输出到比例阀,输出的最小值对应-4.1v电压;若继电器60.07为0,即功率偏差为正值,将d2100的值通过scl3指令按比例系数缩放,并通过lmt指令输出到比例阀,输出的电压最大值为1.8v。